
| 5 Programming Approaches | Powerful APIs, 7 languages | Remote API | ||||||||||||||
 |
 |
 |
||||||||||||||
|
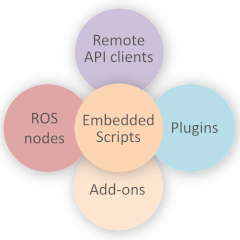
Simulator and simulations are fully customizable, with 5 programming approaches that are mutually compatible and that can even work hand-in-hand. 6 supported programming languages. |
Regular API: Python, Lua and C/C++
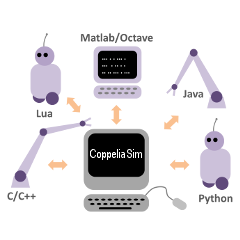
Remote API: C/C++, Python, Java, JavaScript, Matlab & Octave
ROS interfaces: publishers, subscribers & service calls. Support all standard messages, extendable.
|
Control a simulation or the simulator itself remotely (e.g. from a real robot or another PC) |
||||||||||||||
| Dynamics/Physics | Inverse/Forward Kinematics | Soft Bodies | ||||||||||||||
 |
 |
 |
||||||||||||||
|
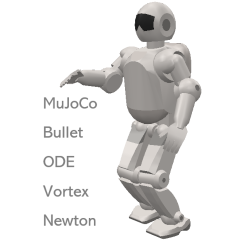
5 physics engines (MuJoCo, Bullet Physics, ODE, Vortex and Newton Dynamics) for fast and customizable dynamics calculations, to simulate real-world physics and object interactions (collision response, grasping, etc.) |
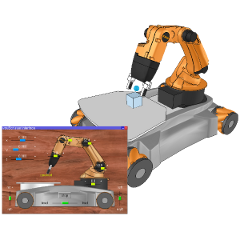
Inverse/forward kinematics calculations for any type of mechanism (branched, closed, redundant, containing nested loops, etc.). An embeddable version of the IK/FK algorithms is available (i.e. can run on your robot). |
CoppeliaSim supports via the MuJoCo engine soft bodies, strings, ropes, cloths, etc. |
||||||||||||||
| Collision Detection | Minimum Distance Calculation | Cross-Platform & Portable | ||||||||||||||
 |
 |
 |
||||||||||||||
|
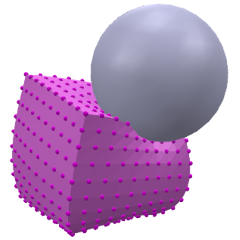
Fast interference checking between any mesh, OC tree, point cloud, or collection of those. |
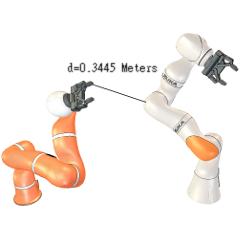
Fast and exact minimum distance calculation between any mesh (convex, concave, open, closed), OC tree, point cloud, or collection of those. |
CoppeliaSim is cross-platform, and allows the creation of portable, scalable and easy maintainable content: a single portable file can contain a fully functional model (or scene), including control code. |
||||||||||||||
| Proximity Sensor Simulation | Vision Sensor Simulation | Building Block Concept | ||||||||||||||
 |
 |
 |
||||||||||||||
|
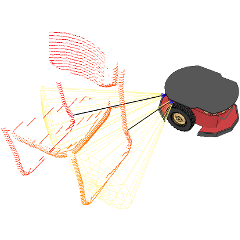
Powerful and realistic proximity sensor simulation (exact min. distance calculation within a customizable detection volume). Much more continuous operation than with discrete ray sensors. Operates on meshes, OC trees and point clouds |
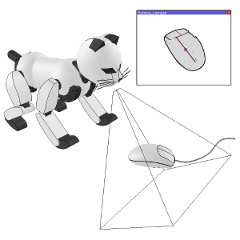
Simulation of vision sensors with many possibilities for image processing, fully customizable and extendable (e.g. via plugin) |
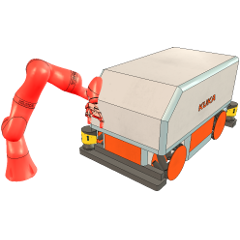
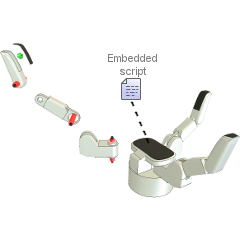
Anything - from sensors or actuators, to whole robotic systems - can be built within CoppeliaSim by combining basic objects and linking various functionality via embedded scripts. Every scene object can have its own embedded script! |
||||||||||||||
| Path/Motion Planning | Data Recording and Visualization | Custom User Interfaces | ||||||||||||||
 |
 |
 |
||||||||||||||
|
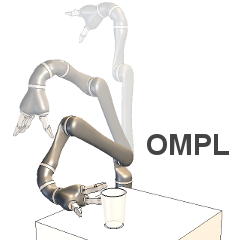
Path planning / motion planning is supported in a very flexible way via the OMPL library wrapped in a plugin for CoppeliaSim |
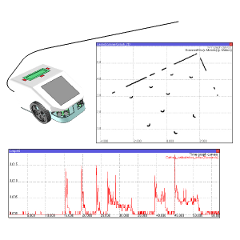
A large variety of recordable data streams (including user-defined) can display time-graphs, or can be combined with each other to form x/y-graphs, or 3D curves |
Unlimited number of fully customizable user interface elements |
||||||||||||||
| Integrated Edit Modes | Easy Data Import/Export | RRS Interface & Motion Library | ||||||||||||||
 |
 |
 |
||||||||||||||
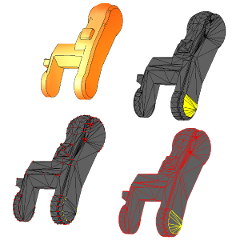
Special mesh edit modes are supported (including a semi-automatic primitive shape extraction method, convex decomposition, mesh decimation, etc.) |
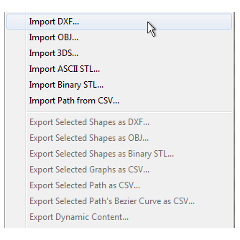
Many formats are supported: URDF, SDF, Collada, STL, DXF, OBJ, glTF, etc. |
The RRS-1 interface specifications are fully implemented, and the Reflexxes Motion Library and Ruckig Online Trajectory Generator are fully supported. |
||||||||||||||
| Full-Featured Scene Hierarchy | Convenient Model Browser | Full Interaction | ||||||||||||||
 |
 |
 |
||||||||||||||
The scene composition is intuitively visualized in a scene hierarchy view, indicating object aliases, types, associated control scripts, loop closures, selection and visibility states, warnings, etc. |
The integrated model browser supports drag-and-drop operations (also during simulation!) for convenient scene composition. The available model library, updated at each release, can be easily extended by the user |
Full interaction also during simulations: models, together with their associated behavior (i.e. embedded scripts) can be shifted, rotated, copy/pasted, scaled, erased, etc. without having to adjust any code |
||||||||||||||
| Free Educational License | Free Player Version | Many More features | ||||||||||||||
 |
 |
 |
||||||||||||||
|
Educational entities (hobbyists, students, teachers, professors, schools and Universities) can use CoppeliaSim Edu for free. The source code of all elements is available. Refer to the licensing page for details |
A free CoppeliaSim Player version is available, and allows running and interacting with CoppeliaSim simulations |
e.g. three.js browser-based viewer, multilevel undo/redo, movie recorder, simulation of paint or welding seams, OC trees, point clouds, exhaustive documentation, etc. |
||||||||||||||