|
User config callback functionsA customization script that includes a user config callback function (which is one of many system callback functions), will display a configuration dialog icon, in the scene hierarchy:
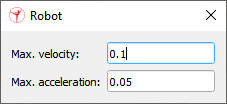
[Configuration dialog icon] When double-cliked, the user config callback function is triggered. This can be used as a convenient way of displaying a custom user interface to the user, that is specific to the object/model the customization script is attached to. User data can be read and written to objects with sim.readCustomDataBlock/sim.writeCustomDataBlock for instance:
[Custom configuration dialog] #python
def sysCall_init():
sim = require('sim')
simUI = require('simUI')
self.modelHandle = sim.getObject('.')
def sysCall_userConfig():
xml = '''<ui title="Robot" closeable="true" modal="true" layout="form" on-close="customUiClosed">
<label text="Max. velocity:" />
<edit id="1" value="-" on-editing-finished="velocityChanged"/>
<label text="Max. acceleration:" />
<edit id="2" value="-" on-editing-finished="accelerationChanged"/>
</ui>'''
ui = simUI.create(xml)
data = readData()
simUI.setEditValue(ui, 1, str(data['maxVel']))
simUI.setEditValue(ui, 2, str(data['maxAccel']))
def customUiClosed(ui):
simUI.destroy(ui)
def velocityChanged(ui, id, val):
data = readData()
val = float(val)
if val:
if val < 0.1:
val = 0.1
if val > 0.5:
val = 0.5
data['maxVel'] = val
simUI.setEditValue(ui, id, str(data['maxVel']))
writeData(data)
def accelerationChanged(ui, id, val):
data = readData()
val = float(val)
if val:
if val < 0.01:
val = 0.01
if val > 0.2:
val = 0.2
data['maxAccel'] = val
simUI.setEditValue(ui, id, str(data['maxAccel']))
writeData(data)
def readData():
data = sim.readCustomDataBlock(self.modelHandle, 'RobotParams')
if data:
data = sim.unpackTable(data)
else:
data = {}
data['maxVel'] = 0.2
data['maxAccel'] = 0.05
return data
def writeData(data):
sim.writeCustomDataBlock(self.modelHandle, 'RobotParams', sim.packTable(data))
--lua
function sysCall_init()
sim = require('sim')
simUI = require('simUI')
modelHandle = sim.getObject('.')
end
function sysCall_userConfig()
local xml = [[<ui title="Robot" closeable="true" modal="true" layout="form" on-close="customUiClosed">
<label text="Max. velocity:" />
<edit id="1" value="-" on-editing-finished="velocityChanged"/>
<label text="Max. acceleration:" />
<edit id="2" value="-" on-editing-finished="accelerationChanged"/>
</ui>]]
local ui = simUI.create(xml)
local data = readData()
simUI.setEditValue(ui, 1, tostring(data.maxVel))
simUI.setEditValue(ui, 2, tostring(data.maxAccel))
end
function customUiClosed(ui)
simUI.destroy(ui)
end
function velocityChanged(ui, id, val)
local data = readData()
val = tonumber(val)
if val then
if val < 0.1 then
val = 0.1
end
if val > 0.5 then
val = 0.5
end
data.maxVel = val
end
simUI.setEditValue(ui, id, tostring(data.maxVel))
writeData(data)
end
function accelerationChanged(ui, id, val)
local data = readData()
val = tonumber(val)
if val then
if val < 0.01 then
val = 0.01
end
if val > 0.2 then
val = 0.2
end
data.maxAccel = val
end
simUI.setEditValue(ui, id, tostring(data.maxAccel))
writeData(data)
end
function readData()
local data = sim.readCustomDataBlock(modelHandle, 'RobotParams')
if data then
data = sim.unpackTable(data)
else
data = {}
data.maxVel = 0.2
data.maxAccel = 0.05
end
return data
end
function writeData(data)
sim.writeCustomDataBlock(modelHandle, 'RobotParams', sim.packTable(data))
end
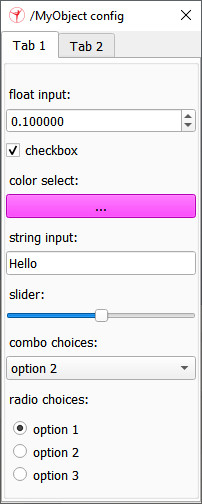
You may also use the configUI module for quicker set-up of custom configuration dialog, that will also automatically write data to custom data blocks:
[Custom configuration dialog based on configUI module] --lua
require('configUi')
function sysCall_init()
local schema = {
floatInput = {
default = 0.1,
maximum = 4,
minimum = 0.05,
name = "float input",
type = "float",
ui = {
control = "spinbox",
tab = "Tab 1", order = 1, col = 1
},
},
intInput = {
default = 1,
maximum = 10,
minimum = 0,
name = "int input",
type = "int",
ui = {
control = "spinbox",
tab = "Tab 1", order = 2, col = 2
},
},
checkbox1 = {
type = 'bool',
name = 'checkbox1',
default = true,
ui = {tab = "Tab 1", order = 3, col = 1},
},
checkbox2 = {
type = 'bool',
name = 'checkbox2',
default = false,
ui = {tab = "Tab 1", order = 4, col = 2},
},
colorselect = {
type = 'color',
name = 'color select',
default = {1, 0, 1},
ui = {tab = "Tab 2", order = 5, col = 1},
},
stringInput = {
default = "Hello",
name = "string input",
type = "string",
ui = {tab = "Tab 2", order = 6, col = 2},
},
floatSlider = {
default = 0.5,
maximum = 1,
minimum = 0,
name = "float slider",
type = "float",
ui = {
control = "slider",
tab = "Tab 2", order = 7, col = 1
},
},
intSlider = {
default = 1,
maximum = 10,
minimum = 0,
name = "int slider",
type = "int",
ui = {
control = "slider",
tab = "Tab 2", order = 8, col = 2
},
},
choices1 = {
default = 2,
choices = {"option 1", "option 2", "option 3"},
name = "combo choices",
type = "choices",
ui = {
control = "combo",
tab = "Tab 3", order = 9, col = 1
},
},
choices2 = {
default = 1,
choices = {"option 1", "option 2", "option 3"},
name = "radio choices",
type = "choices",
ui = {
control = "radio",
tab = "Tab 3", order = 10, col = 1
},
},
}
sim.writeCustomDataBlock(sim.getObject('.'), '__schema__', sim.packTable(schema))
configUi = ConfigUI('myModelType', nil, modificationCallback)
end
function modificationCallback(config)
local objectHandle = sim.getObject('.')
local txt = "Object '"..sim.getObjectAlias(objectHandle,5).."' just changed.\nNew parameters are:"
print(txt)
print(config)
end
|